აბაშის ხმა
Каталог статей
| მთავარი » სტატიები » Физика » Метод Зойтендейка |
Линейный поискТолько что было показано, как строить возможное направление спуска или убедиться, что текущая точка удовлетворяет условиям Куна—Таккера. Пусть В качестве следующей точки xk+1 берется , где длина шага К& определяется из решения следующей задачи одномерной минимизации: Минимизировать при условиях
Предположим Тогда задачу одномерной минимизации Ехk=е и Еdk=0, так что задача приводится к следующей задаче линейного поиска;
Алгоритм метода Зойтендейка (случай линейных ограничений) Ниже приведен алгоритм метода Зойтендейка для минимизации дифференцируемой функции f при условии,что Начальный этап. Основной этап. Шаг 1. Пусть задан хk. Предположим, что АT=(А1T, А2T), а bT=(b1T, b2T), так что . Взять в качестве dk оптимальное решение следующей задачи (заметим, что вместо этой задачи можно использовать Р2 или РЗ):  Если , то остановиться;  Шаг 2. Положить равным оптимальному решению еле-., дующей задачи линейного поиска:  где определяется в соответствии с (1). Положить , определить новое множество активных ограничений в и переопределить А1 и А2. Заменить k на k+1 и перейти к
шагу 1. Заметим, чт. Решим задачу методом Зойтендейка, взяв в качестве начальной точки . Каждая итерация алгоритма содержит решение подзадачи, Итерация 1  Поиск направления. В точке имеем . Кроме того, в точке x1 активными являются только ограничения неотрицательности переменных, так что l = {3,4}. Задача для нахождения направления имеет вид Рис. 2
Эту задачу можно Линейный поиск. которого точка допустима, вычисляется по формулам и равно
Следовательно, минимизировать —10+2 при условии 0£ £ . Очевидно, что Итерация 2
Поиск, направления. В точке имеем с 3. Кроме того, минимизировать при условии Читатель может Линейный поиск. Максимальное значение l для которого точка Х2+ld2 остается допустимой, определяется в соответствия с (1) следующим образом: Таким образом, в минимизировать при условии
Оптимальным  Рис 4. Итерация 3 Поиск направления. В точке х3=имее Кроме того, множество активных ограничений Можно легко В этой конкретной Таблица 1  Результаты вычислений по методу Зойтендейка для случая линейных ограничений 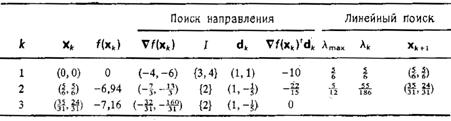 Рис. 5. Поиск решения
В табл. 1 приведены результаты вычислений для рассмотренной | |
| ნანახია: 535 | კომენტარი: 1 | |

| სულ კომენტარები: 0 | |
სექციის კატეგორიები | |||||||
|---|---|---|---|---|---|---|---|
|
შესვლის ფორმა |
|---|
ძებნა |
|---|
მინი-ჩეთი |
|---|
საიტის მეგობრები |
|---|
სტატისტიკა |
|---|
სულ ონლაინში: 1 სტუმარი: 1 მომხმარებელი: 0 |
